... consist of a few steps:
"mysystem.par"aoread,"mysystem.par"aoinit,some keywords...aoloop,some keywords...goLet us now enter into some details.
Is yorick installed ? All set up as per the
installation instructions ? Then go
to the examples directory of the yao distribution; this might be in different locations
depending on how you installed yao. To determine where is it is, run
the command find_examples_path() within yao.
Type the following at the unix prompt:
poliahu:~ $ yorick -i yao.i Copyright (c) 2005. The Regents of the University of California. All rights reserved. Yorick 2.1.05x ready. For help type 'help' Yao version 4.5.0, Last modified 2009oct23 >
You get the yorick and yao welcome messages and the yorick prompt. Alternatively, you can start a normal yorick session and then include yao at any time by typing:
> #include "yao.i"
You can double check everything is normal by typing:
> info,aoread func aoread(parfile)
if you get this message, you are in business. If not, fix your yorick installation. Click here to show/hide notes on Yorick.
The first thing to do is to create phase screens (to simulate turbulence). Type
> create_phase_screens,2048,256,prefix="screen"
This will create N (N=long dimension/short dimension, 8 in that case)
phase screens of dimension 2048x256 suitable for use by yao.
It is advised to choose dimensions that are powers of 2. Depending on
your platform and CPU, it may take some time (1mn or so),
as this routine is absolutely not optimized. This is a one shot run.
You will not need to do that everytime you run yao,
as you can, and are encouraged, to use the same phase screens. You may
need to run it once more to create larger phase screens
if the need arises, but that's about it. The phase screens
(screen1.fits to screen8.fits in the example above) will be created in the current
working directory. Move them somewhere convenient (I have them in
Y_USER/data=.yorick/data in my case). You will need to edit
the yao parameter files to reflect the path and names of these
phase screens if you put it somewhere different or used a different name (look for "atm.screen" in the parfile).
Next, we will try to run "sh6x6", which is a simple 6x6 Shack-Hartmann
example. After you have edited the "sh6x6.par" file (in the examples directory) and modified the
path and filename of the newly created phase screens, if needed, type:
> aoread,"sh6x6.par" Yao, Version 4.5.0, 2009oct23 Checking parameters ... No field stop defined for wfs 1. Setting to 'square' wfs(1).fssize has not been set, will be forced to subap FoV dm(1).coupling set to 0.200000 dm(1).iffile set to sh6x6-if1.fits dm(2).iffile set to sh6x6-if2.fits OK >
What aoread() does is (a) read, or rather include, the
parameter file, which will fill the various structures containing
the definitions of the WFS, DM, loop, etc... and (b) go through a
simple check of the parameters to see if anything is missing or if
there are incompatible assigments, in which case it will print out an
error message (hopefully understandable). Otherwise, it prints out
informational messages or warnings.
Then we need to initialize the system. aoinit() will
do that for us. It will initialize all
the arrays (pupil, etc), initialize the system pupil, the various
WFS, DM, etc. It will then compute the interaction matrix, invert it
and finally plot (if requested) a graphical system
configuration. The amount of information you get during
the aoinit is set by sim.verbose. The default verbose
in sh6x6.par is 0, which means you get no feedback
at all except for warnings and error messages. Let's set sim.verbose
to 1 and run aoinit():
> sim.verbose=1
> aoinit,disp=1,clean=1
Checking parameters ...
OK
> INITIALIZING PHASE SCREENS
Reading phase screen "~/.yorick/data/screen1.fits"
Reading phase screen "~/.yorick/data/screen2.fits"
Reading phase screen "~/.yorick/data/screen3.fits"
Reading phase screen "~/.yorick/data/screen4.fits"
> INITIALIZING SENSOR GEOMETRY
Kernel FWHM for the iMat calibration = 0.364983
Pre-computing Kernels for the SH WFS
WFS# | Pixel sizes | Subap. size | Number of pixels | #photons
| Desired Quantum Actual | Max Actual | Desired Actual | /sub/iter
1 0.20000 0.03182 0.19093 2.04 1.91 10x10 10x10 70735.5
NGS#1 flux varies between 42795 and 70736 photon/subap/it
> Initializing DM influence functions
>> Computing Influence functions for mirror # 1
Creating Influence function for actuator #1 2 3 4 5 6 7 8 9 10 11 12
13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35
36 37 38 39 40 41 42 43 44 45 46 47 48 49
>> Storing influence functions in sh6x6-if1.fits... Done
>> Computing Influence functions for mirror # 2
>> Storing influence functions in sh6x6-if2.fits... Done
> DOING INTERACTION MATRIX
DM #1: # of valid actuators: 45. (I got rid of 4 actuators after iMat)
>> valid I.F. stored in sh6x6-if1.fits
Computing valid to extrap. matrix for DM#1
> INITIALIZING MODAL GAINS
I did not find simulModeGains.fits or it did not have the right
number of elements (should be 47), so I have generated
a modal gain vector with ones in it.
> INTERACTION AND COMMAND MATRICES
>> Preparing SVD and computing command matrice
Smallests 2 normalized eigenvalues = 0.014315 1.62232e-07
4 modes discarded in the inversion
Summary:
Mirror #1, stackarray, 45 actuators, conjugated @ 0 m
Mirror #2, tiptilt, 2 actuators, conjugated @ 0 m
WFS # 1, hartmann (meth. 2), 32 subap., offaxis (+0.0",+0.0"), noise enabled
D/r0 (500nm) = 42.4; 5000 iterations
>
At this point you have initialized everything.
The aoinit() keyword clean indicates that you want to
start from scratch, and ignore any influence function or
interaction/command matrix files on your disk. The disp=1 is to
get some graphical feedback. You are now ready to run the loop:
> loop.niter = 1000
> aoloop,disp=10
NGS#1 flux varies between 42795 and 70736 photon/subap/it
> Starting loop with 1000 iterations
> go
Iter# Inst.Strehl Long expo.Strehl Time Left
1 0.000 0.000 00:00:18.8
51 0.407 0.393 00:00:15.1
101 0.412 0.410 00:00:13.7
[...]
901 0.647 0.504 00:00:01.4
951 0.546 0.507 00:00:00.7
Saving results in /home/frigaut/yorick-2.1/share/yao/examples/sh6x6.res (ps,imav.fits)...
time(1-2) = 9.49 ms (WF sensing)
time(2-3) = 0.03 ms (Reset and measurement history handling)
time(3-4) = 0.01 ms (cMat multiplication)
time(4-5) = 1.85 ms (DM shape computation)
time(5-6) = 1.44 ms (Target PSFs estimation)
time(6-7) = 1.53 ms (Displays)
time(7-8) = 0.05 ms (Circular buffers, end-of-loop printouts)
Finished on 00:26:30
69.040800 iterations/second in average
lambda XPos YPos FWHM[mas] Strehl E50d[mas] #modes comp.
Star# 1 1.65 0.0 0.0 44.1 0.507 172.0 35.1
Field Avg 1.65 44.1 0.507 172.0
Field rms 0.0 0.000 0.0
>
You have ran 1000 iterations (loop.niter
in sh6x6.par is larger so we changed it before starting
the loop in the example above to keep your demo time reasonable
-note if you want to make it larger than the initial value, you will
need to re-run aoinit()). disp=10 in the call means "do your
displays every 10 iterations". Depending on your graphic card,
displays can be pretty expensive (time), thus it helps to display less frequently.
At any time, while the loop is running, you have access to the yorick prompt. You can type regular commands, but the most useful are:
stop which will pause the execution of the
loop, cont which will resume the loop where it paused,reset which will reset commands and dm
shape,restart which will restart from iteration 1. at the completion of the requested number of
iterations, go() will automatically call the
function after_loop(), which outputs a number of things
as shown above (starting from "Saving results..."): Some statistics on execution time and number of
iterations per seconds, and the Strehl, FWHM, etc, on every "target"
for which positions were specified in the parameter file. You can
call after_loop() by hand at any time also, and you
can call it multiple times.
The resulting average images have been saved on disk ("sh6x6-imav.fits"),
together with a small postscript file ("sh6x6.ps") that contains some
graphics. Strehl, FWHM and 50 percent encircled energy are available as
extern variables under the name strehl, fwhm and e50 (the averaged PSFs
are also available, together with the history of DM commands, DM errors and
WFS measurements if the keyword savecb= has been set):
> strehl [[0.434317]]
These variables contains the values for all the images (here there is only one, but there can be an arbitrary number of positions and wavelengths at which you want to estimate the performance). This can be useful in script, as detailled below.
Finally, note that you can have access to some documentation on
each function by typing help,function_name, e.g:
> help, aoinit
/* DOCUMENT aoinit(disp=,clean=,forcemat=,svd=,dpi=,keepdmconfig=)
Second function of the ao serie.
Initialize everything in preparation for the loop (aoloop).
Follows a call to aoread, parfile.
disp = set to display stuff
clean = if set, aoinit will start fresh. *Nothing* is kept from
[...] Tip: sometimes the document section of a
function is not up to date. You can get a peek on the actual function API by using info:
> info, aoinit func aoinit(disp=,clean=,forcemat=,svd=,dpi=,keepdmconfig=)
Here is an example of a parameter file (parfile). Comments below.
// YAO parameter file //------------------------------- sim.name = "SH6x6 w/ TT mirror and WFS, full diffraction WFS"; sim.pupildiam = 120; sim.debug = 0; sim.verbose = 0; //------------------------------- atm.dr0at05mic = 42.44; // this is r0=0.166 at 550 nm atm.screen = &(Y_USER+"data/screen"+["1","2","3","4"]+".fits"); atm.layerfrac = &([0.4,0.2,0.3,0.1]); atm.layerspeed = &([11.,20,29,35]); atm.layeralt = &([0.,400,6000,9000]); atm.winddir = &([0,0,0,0]); //------------------------------- nwfs = 1; // number of WFSs (>1 if e.g. mcao) wfs = array(wfss,nwfs); wfs(1).type = "hartmann"; wfs(1).lambda = 0.65; wfs(1).gspos = [0.,0.]; wfs(1).gsalt = 0.; wfs(1).gsmag = 5.; wfs(1).shmethod = 2; wfs(1).shnxsub = 6; wfs(1).pixsize = 0.2; wfs(1).npixels = 10; wfs(1).noise = 1; wfs(1).ron = 3.5; wfs(1).shthreshold = 0.; wfs(1).nintegcycles= 1; wfs(n).svipc = 2; //------------------------------- ndm = 2; dm = array(dms,ndm); n =1; dm(n).type = "stackarray"; dm(n).nxact = 7; dm(n).pitch = 20; dm(n).alt = 0.; dm(n).unitpervolt = 0.01; dm(n).push4imat = 100; n =2; dm(n).type = "tiptilt"; dm(n).alt = 0.; dm(n).unitpervolt = 0.0005; dm(n).push4imat = 400; //------------------------------- mat.condition = &([15.]); //------------------------------- tel.diam = 7.9; tel.cobs = 0.1125; //------------------------------- target.lambda = &([1.65]); target.xposition = &([0.]); target.yposition = &([0]); target.dispzoom = &([1.]); //------------------------------- gs.zeropoint = 1e11; //------------------------------- loop.gain = 0.6; loop.framedelay = 1; loop.niter = 5000; loop.ittime = 2e-3; loop.startskip = 10; loop.skipevery = 10000; loop.skipby = 10000; loop.modalgainfile = "simulModeGains.fits"; //-------------------------------
The parfile defines entirely your system. It consists of nine subsections in which the yao structures are filled. All of the structure members are listed in the yao structure section, together with a short explanation of each parameters (structure member). How to combine these parameters to get yao to do what you want is explained in the controlling features section below.
Several comments:
& so
that &a is the pointer to the
quantity a. The notation atm.layerfrac = &([0.4,0.2,0.3,0.1]);is a shorthand for
a=[0.4,0.2,0.3,0.1]; atm.layerfrac = &a;If you forget the & sign, it should generate an error.
find_examples_path() will tell you where
this directory is). Browse through these examples. It is
recommended to actually start from one of these, preferably one that is close to
the system you want to simulate, and adapt it to your needs, rather
than starting from scratch.aoread(), aoinit(),
aoloop() and go() as shown in section 1.In yao, you have to define the AO system you want to simulate. It starts by defining an entrance aperture (the system pupil). This is done through 2 parameters: the physical pupil size (e.g. diameter) in real world units, meters. And because yao is a monte-carlo code, that uses arrays to generate phases and PSFs, we will need a pupil array and thus a pupil diameter in pixel.
sim.pupildiam <- this is the pupil diameter in pixel (unitless) tel.diam <- this is the telescope diameter in meters

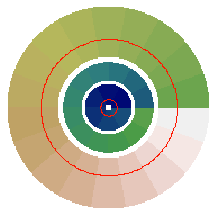
Typical geometry of a system (WFS and DM)
yao also uses arrays to store the deformable mirror influence functions, etc. Generally speaking, there are two types of variable and arrays: the one referring to quantities in the near field (pupil plane or close to it, e.g. altitude layers) and the one referring to quantities in the far field (Shack-Hartmann WFS spots, PSF image, observed object, etc...).
The figure on the right illustrates how you can set up a Shack-Hartmann + Stackarray deformable mirror (allegedly the most common type of AO system to date). I will review all these parameters in sections below, but what I want to emphasize here is the following:
The size of the pupil is actually quite important. By property of the Fourier transform, the field of view in the far field will be defined by the sampling in the near field, following the relation:
FoV = lambda/pswhere
ps = tel.diam/sim.pupildiam is the pixel size in meter
in the near field. So, for instance,
tel.diam [m] | sim.pupildiam [pixels] | FoV @650nm [''] | FoV @1.65microns [''] | Comment |
| 8 | 128 | 2.14 | 5.44 | |
| 30 | 256 | 1.14 | 2.90 | Probably too low |
| 30 | 512 | 2.28 | 5.80 |
Choose the field of view according to your application. But because
eventually you will want to run simulations in presence of turbulence,
I generally advise to take at least 2 points per r0
(near field), and preferably 3. For r0 = 16 cm, that means a
sampling of 8 cm (resp 5.33 cm), and for a 8-m telescope that would translate
into 100 points (resp 150) across the pupil (sim.pupildiam = 100).
If this is not done, you will likely end up with aliasing in the SHWFS
subaperture images (probably less so in the final image if it is estimated
in the Near Infrared and the WFS works in the visible).
This is bad and will bias your results. You have been warned.
That said, yao 5.0 has introduced a new feature for Shack-Hartmann WFS:
extended field of view. When using this feature (control it with
wfs.extfield), the individual subaperture imagelets are embedded into larger intermediate images before being binned and embedded into the final SHWFS spot image. This allows extending the field of view of subapertures without the prohibite cost of using a very large number of pixels in your pupil diameter (as outlined above). It is of particular interest for large LGS elongations, e.g. for ELTs. The whole process, describing the steps used to compute the SHWFS final spot image, is somewhat detailled in this page.
Historically, yao was developed assuming circular pupils. So in any case,
as said above, you will have to define sim.pupildiam and
tel.diam. If another pupil shape is desired, it can be defined
through a call to a user defined function user_pupil(). Click
here to show/hide
an example.
Set wfs.type="hartmann". The only other mandatory parameters to
define are wfs.shnxsub, wfs.npixpersub, wfs.npixels, wfs.pixsize and wfs.lambda.
Below I expand on these parameters.
The near field parameters that need to be defined are:
wfs.shnxsub: The number of subapertures in the aperture diameterwfs.npixpersub: The number of pixels across one subaperture, in the near field.
For a "normal" system, we want wfs.shnxsub * wfs.npixpersub = sim.pupildiam.
But as said above, you can make npixpersub larger or smaller if you want to
investigate the effect of subapertures larger or smaller than ideal. Also,
by setting wfs.pupoffset [meter], you can investigate the effect of
misregistration of the WFS w.r.t the entrance pupil
(Show/Hide details).
The far field parameters to define for a SHWFS are:
wfs.npixels: The number of (CCD) pixel per subaperture in
the far fieldwfs.pixsize: The SHWFS (CCD) pixel size, in arcsec.So that of course, the subaperture field of view will be
wfs.npixels * wfs.pixsize. The whole discussion about
sampling above of course applies here too, and
field of view can not be arbitrary large. The pixel size is also constrained
by FFT properties, and yao will round the pixel size you have selected to the
nearest possible value (this should be printed out on screen during
aoinit if sim.verbose>=1).
Since v4.5.0, yao can handle field stops (before also, but not in the same
easy fashion), defined using the parameters wfs.fstop, wfs.fssize and wfs.fsoffset.
You have the choice between no field stop (wfs.fstop="none"),
or a square or round field stop (wfs.fstop="square" or "round").
If needed, you can use your own defined geometry by setting wfs.fsname
to the name of a fits file that contains the image of a field stop
(show/hide how).
The default is to use a square field stop of size equal to the subaperture
field of view (i.e. optimal).
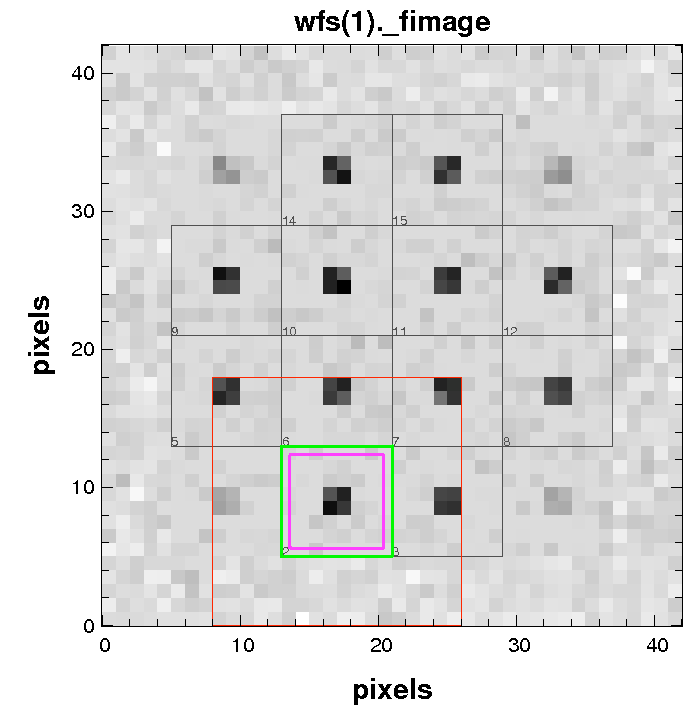
Shack-Hartmann focal plane features
Since v4.5.0, yao correctly includes coupling between neighbor subapertures: In a real system, if there is no field stop, the spot image of a subaperture can wander into a neighbor subaperture and wreak havoc the slope estimation. yao now correctly handle this behavior: all subaperture images are computed, then added to an image that will include all spots. When all spots have been computed, each spot image is extracted and the spot position is estimated from there (center of gravity, soon to come weighted CoG, etc...).
When the correct debug setting is selected (sim.debug>=1), aoinit() will
display a SHWFS far field graphic configuration diagram as shown on the
right (click on it to enlarge). Reported on it are:
*wfs._fimage, if the need arises. This image includes the
spots from all subapertures, including the ones which
are not "valid" (because their fractional flux is lower than wfs.fracIllum).
The valid subaperture spots are indicated by the thin grey squares.Set wfs.type="curvature". The only other mandatory parameters
to define are wfs.l, wfs.nsubperring and wfs.lambda:
CWFS Subaperture map
wfs.l is the extra focal distance in an F/60 beam.
The first curvature system for astronomy, the UH13, had a WFS input beam
of F/60 (on the membrane mirror), and thus use to define extra focal distance
in a F/60 beam. I wrote aosimul, the precursor to yao, to model PUEO, the
curvature system for the CFHT, which was largely based on UH13. So from then
on, to have a common ground, I (and other people) used to quote extra focal
distances in a F/60 beam. It is easy to make the conversion to another F ratio,
but yao only handles these units.wfs.nsubperring: typically, to date, most of the curvature
WFS for astronomy were based on a polar design: rings of subapertures.
wfs.nsubperring is a pointer to a long vector that contains
the number of subaperture per ring: the first element is the number of
subapertures in the first ring, the second element the number
of subaperture in the second ring, etc.. so that wfs.nsubperring
could look like &([6,12,18]) for a system with 3 rings of
with 6, 12 and 18 subapertures (the & is because wfs.nsubperring
is a pointer). yao automatically computes the inner and outer radius of
each ring so that every subaperture receives the same amount of light.
The user can modify this behavior by setting wfs.rint and
wfs.rout to speficy the inner and outer radius of each ring.
(show/hide details).
Briefly: The Pyramid WFS, in yao, is defined very similarly to the SH
WFS. You have to define wfs.shnxsub (# of subapertures in pupil
diameter), and the number of pixels in the pupil/phase plane per
subaperture, wfs.npixpersub. For instance, if you want to simulate a
pyramid WFS with 8x8 "subapertures" (pixels in pupil image), you can
use: wfs.shnxsub=8, wfs.npixpersub=8, in which case sim.pupildiam=64.
Currently, we can't have sim.pupildiam != wfs.shnxsub *
wfs.npixpersub.
Other parameters used by the pyramid WFS only are listed in the structure table below. They are commented and fairly self-explanatory. Note that it is important (and required) to set a field stop when working with pyramid wfs in yao. The way it's implemented, the execution speed depends on the field stop diameter, so don't be surprised. Use a field stop large enough to avoid aliasing and growth of waffle like modes.
Set wfs.type="zernike". The only other mandatory parameter
is wfs.nzer, which, as its name says, define the number
of zernike in the WFS. Note that this include piston, so wfs.nzer=11
would include up to spherical (included). Important note: The Zernike are
the Noll Zernike (see Noll 1976), which are not the
standard Zernike, but the one used most commonly in AO.
Set wfs.type="name_of_your_function".
Users can define their own WFS, to be integrated into the yao flow. The API are relatively straighforward:
func user_wfs_func(ipupil,phase,ns,init=)where
sim._size),ns is the WFS number (as defined in the parfile), andaoinit()) that allow the user function to make some
initializations, if needed.The function should return a measurement vector (show/hide example).
Photometry and noise are only relevant (and implemented) for Shack-Hartmann and Curvature WFS.
All the photometry is controlled with the wfs.gsmag, wfs.skymag
and wfs.zeropoint. wfs.zeropoint is defined in
photons/second/full_aperture (incident on the telescope aperture, i.e. after
crossing the atmosphere). Note that this depends on the telescope diameter
(may be it was a bad choice to define it like that, but now it's done). It is
simple enough to convert known photometric zero point to yao zeropoint. The
number of photons available for WFSing is derived from this zeropoint and the
above mentioned magnitude following regular equations (see also wfs.optthroughput).
yao doesn't have a concept of ADU. Or rather, I am assuming one electron/ADU across the board. So the signal in in electrons, and the noise is also in electrons.
The deformable mirrors are entirely and solely defined through their
influence functions (shape and location). During the aoinit() phase, yao calls
DM influence function definition functions, for each DM in the parameter
file. Once computed, the influence functions are stored in the dm
structure (*dm._def) and saved on disk for future runs (name-if#.fits files). Note that if you have a set of commands,
you can get the DM surface by calling
surf = compute_dm_shape(nm,command_ptr);
where command_ptr is a pointer to a float vector containing the DM
commands (e.g. command_ptr = &(float(indgen(dm._nact)))).
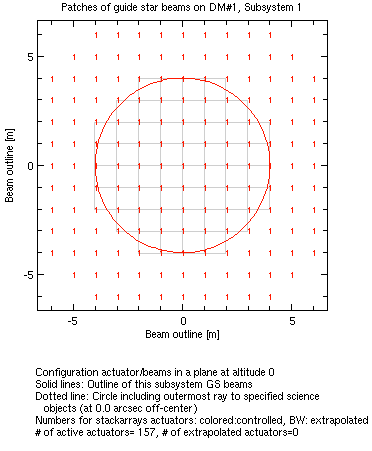
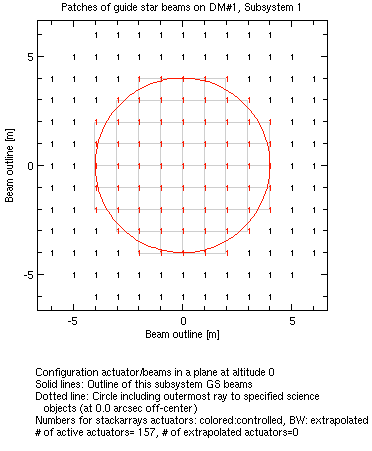
Set dm.type="stackarray". The only other mandatory parameters
for stackarrays are dm.pitch and dm.nxact.
dm.nxact sets the number of actuators in the diameter of the DM
(along the X or Y axis). This includes extrapolated/slaved actuators/guard rings.
dm.pitch sets the pitch (i.e. interactuator distance) in
near field pixels.
Note that you have to dimension the stackarray DM according to your base system
definition (sim.pupildiam). If you set
sim.pupildiam=60 and dm.nxact=7 and you do not desire
an extra ring of actuator, then you should set dm.pitch=10 to span
the entire pupil diameter (7 actuators, 6 spaces between actuators...).
This was the first type of DM implemented in yao. With time, we have
implemented several type of influence functions. By default, it uses
a functional form which was first derived by J.-P. Gaffard of then CGE
(now CILAS) to fit ZIGO measurements of CGE DM's real influence functions.
It is possible to use newer (but not necessarily better) forms by
setting dm.irexp:
dm.irexp | functional form |
| 0 | Old, adhoc functional form fitted on actual ZIGO data |
| 1 | exp(-(d/irfact)^1.5) |
| 2 | sinc*gaussian |
irfact is set through dm.irfact.
You can set the inter-actuator coupling with dm.coupling.
dm.coupling=0.3 means 30% coupling between an actuator and its
nearest neighbor. Typical value are 0.1-0.4. The almost universal consensus
nowadays is to use coupling values of about 0.3.
Stackarray mirrors have very local influence functions. Therefore, for
large number of actuators, most of the surface of the DM is zero. It
is thus a big waste of RAM and disk (these influence functions take
a lot of space). Enabling dm.elt will save most of this space back:
only a small subsection of the whole DM surface is kept, surrounding
the actuator. The coordinates of this subimage is kept, and used later
by comp_dm_shape() to compute the correct DM shape. The
call to comp_dm_shape() is transparent. Depending on the
value of dm.elt for the current
DM, comp_dm_shape() will call the relevant C
routine. In fact, there is no compromise in setting dm.elt, but its
benefit really only show up for large stackarray DM (dm.nxact≥10).
The idea in yao is to define all of your stackarray mirror in your parameter
file, then run aoinit() and calibrate the iMat, then select
which actuators are controlled and which are extrapolated based on the WFS
sensitivity to it. Use dm.thresholdresp to select this threshold.
This is a fractional number, so 1 would filter all actuators and 0 would retain
them all. 0.5 would retain all actuator which measurement max response
is larger than the max response of all actuators. Note that if you set
dm.thresholdresp to a negative value, aoinit() will
enter an interactive mode into which you can test various values of
dm.thresholdresp
(Show/Hide example).
Once extrapolated actuators are selected, yao stores the valid influence functions
and the extrapolated ones in 2 different files (e.g.
test-if1.fits and test-if1-ext.fits). Influence functions
are not recomputed in further calls to aoinit() unless the
clean keyword is set (in which case aoinit() restart from scratch
and recompute everything).
Set dm.type="bimorph". The other mandatory parameter
is dm.nelperring.
dm.nelperring: This is similar to wfs.nsubperring
(see here) and defines the number of
electrodes per ring.
Now, most curvature mirror are a bit different from this simple
design provided by defining dm.nelperring, in which
there is no gap between rings. Many curvature DMs
have for instance a large gap between the outer ring of electrodes
(the one that create mostly boundary conditions) and the next inner
electrode ring. To create more realistic DM electrode pattern, use
angleoffset, rint, rout,
supportRadius and supportOffset.
The general idea follows what has been exposed in the curvature WFS
area above. With rint and rout, one can
define the inner and outer radius of each ring of electrodes, expressed
in fraction of the pupil radius. With
angleoffset, one can define a global rotation per ring,
and with the support* parameters, one can define the
physical properties of the 3 DM support points.
That brings us to the next subject: how curvature DMs are modelled. Right now, what we do is solve the Poisson equation, imposing a given curvature over a given electrode and integrating twice to get the DM surface. Then, we impose that the three points defined as the support location go through the z=0 plane. It's that simple. It means that we do not currently support fancier support method like continuous support (e.g. by a rubber ring), 6 points support, etc..
Set dm.type="zernike","diskharmonic" or "kl". Other mandatory
keywords are dm.nzer (for zernike),
dm.max_order for disk harmonic or dm.nkl
(for KL), which specify the number of modes. Note that nzer
(Zernike) & max_order (disk harmonic) will start and include
piston, while nkl (KL) will not (there is formally no piston mode in the
KL basis).
Set dm.type="segmented". The other mandatory
keywords is dm.nxseg.
dm.nxseg is the number of segment in the long diameter
(X axis).
dm.fradius stands for "filter radius". Segments are
created over a wider area than the nxseg defined above. Only
segments which distance to the (0,0) pupil coordinates is ≤ fradius
will be kept. default dm.pitch*dm.nxseg/2.
Set dm.type="name_of_your_function" (as a string).
The API for the user provided DM function are as follow:
func make_my_dm(nm,disp=)where nm is the DM number. Use the disp keyword to display whatever you need to display when this routine is called. The goal of this routine is to create maps of the influence functions. These maps have to be stored (thus this function has to create and fill) in the array *dm._def (dm._def is a pointer to the data). The proper way to do that is:
func make_my_dm(nm)
{
extern dm; // dm is extern (global)
dim = dm(nm)._n2-dm(nm)._n1+1; // <- important
def = array(float,[3,dim,dim,n_actuator]);
for (i=1;i<=n_actuator;i++) def(,,i) = some_form; // <- fill it to your taste
dm(nm)._def = &def; // <- store influence functions
dm(nm)._nact = n_actuator; // <- important, number of actuators
}
Explanation: In this user supplied function, you have to define the
influence functions (*dm._def) and, importantly, the number of
actuators (dm._nact). Prior to the call to this
function, aoinit() has defined dm._n1
and dm._n2, which are the indices at which these
influence function will go in the big sim._size x
sim._size array used for FFT, etc. The influence functions
are reduced in size to save RAM, as they can
potentially take a lot of memory
space. Normally, dm._n1 and dm._n2 are
defined to include the pupil pixel diameter
(sim.pupildiam) plus 4 pixels padding on each side if
the DM altitude is zero (in the pupil), and are defined to span the
entire sim._size array if the DM altitude is above ground (as there
is no simple way to know where to stop exactly as this depends on
the WFS and target locations). Note that dm is defined
in extern as you are modifying its value.
Set dm.type="tiptilt".
This creates a regular tip-tilt mirror. The units in the command vector are arcsecs.
Set dm.type="aniso".
This has been implemented because of the need in MCAO to control
plate scale modes (also called anisoplanatism modes or quadratic
modes). You will need to set dm.alt to the altitude of
an existing DM of a regular type (e.g. stackarray) that will be
responsible for the creation of the anisoplanatism modes (see
mcao2-bench.par for an example of aniso DM).
Hysteresis is implemented at the top level so that it works for any
kind of DM (during the AO loop only). The parameter dm.hysteresis
is fairly self explanatory: dm.hysteresis=0.1 means 10% hysteresis.
dm.misreg allow to induce DM misregistration (on the fly).
dm.misreg is expressed in pixels, so you will have to do
a small conversion to get it in other units, but this way, it works for
any kind of DM. Note that dm.misreg can be fractional (fraction of a pixel). Because
the size of the array containing the DM influence function is limited to save
memory space, the misregistration using this parameter
can only be of a few pixels (up to 4 I believe for a ground-conjugated DM). If you
wish to induce more registration, use the parameter dm.pupoffset
(see below).
Yao v4.5.0 introduced a new kind of influence function offset parameter:
dm.pupoffset. dm.pupoffset is entered
in meters (a 2 elements vector which contains the x and the y
offsets). Those are transversal offset of the influence functions in the
near field. This functionality is implemented in the
compute_dm_shape() function, so it is general and works for
all types of DM. dm.pupoffset is intended for large offsets,
and the influence functions are shifted by an integer number of pixels
(the requested offset in meter, rounded to the nearest pixel, see
sim.pupildiam and tel.diam). If you want finer control over
the DM position, use dm.misreg (see above).
dm.pupoffset is similar to wfs.pupoffset (see WFS
section), but for the DMs.
The default reconstructor which was initially the only option in YAO is the truncated singular value decomposition (SVD). This is a least-square solution where invisible or poorly sensed modes are totally discarded. A faster and better performing reconstructor (especially for large AO systems) is the minimum mean-square error (MMSE) reconstructor. This MMSE reconstructor can be either built using full matrices or sparse matrices techniques, which offers a significant speed boost.
There are three options for wavefront reconstruction, and these are
set using the mat.method parameter.
mat.method = "svd" mat.condition = &([desired conditioning])
This method computes the reconstructor as
R = (HT H + a C)-1 HT
where H is the interaction matrix (poke matrix), a is a
regularization parameter and C is a regularization matrix. The
regularization matrix (see dm.regtype
or dm.regmatrix) can be user specified or computed by
YAO. If it is computed, it will use an identity matrix by default, or
a matrix created by convolving a laplacian operator by itself. This
matrix has similar statistics to the inverse covariance matrix for
Kolmogorov turbulence and penalizes local waffle in the DM.
The relevant parameters for the MMSE inversion process are
mat.method = "mmse";
dm.regparam = 0.01; // higher for larger systems
dm.regtype = "laplacian"; // "laplacian" or "identity"
dm.regmatrix = &([]); // you can specify your own regularization matrix
A sparse matrix implementation of the above is also available. This is ideal for very large systems with thousands of actuators, as it reduces memory requirements and increases computational speed. Do not use the sparse method when the interaction matrices are not actually sparse (e.g., when using a Zernike DM).
mat.method = "mmse-sparse"; mat.sparse_MR = 1e4; // a number larger than the total number of rows mat.sparse_MR = 1e5; // a number larger than the number of elements dm.regparam = 0.01; // higher for larger systems dm.regtype = "laplacian"; // "laplacian" or "identity" dm.regmatrix = &([]); // you can specify your own regularization matrix
If you set the values of mat.sparse_MN and mat.sparse_MR too low, the system could crash. Too high and you could run out of memory.
It is possible to code your own reconstructor and make YAO use it. You need to overwrite the reconstructor matrix cMat as the matrix that you compute.
You can also save the reconstructor so that it is not overwritten whenever aoinit is run.
cMat = myNewReconstructor;
yao_fitswrite,YAO_SAVEPATH+mat.file,[iMat,transpose(cMat)];
Your reconstructor will, however, be overwritten if you do aoinit,clean=1 or aoinit,svd=1
loop.method = "closed-loop"; loop.framedelay = 1; loop.gain = 0.6; loop.leak = 0.001;
The gain is typically a value around 0.5, and the leak is a small value needed to prevent the build-up of poorly sensed modes on the DM. The framedelay is the compute time rounded to the nearest number of frames, typically 1. There is already a one cycle delay inherent in the zero-order hold of the WFS and the DM stare, and this does not need to be added.
For tomographic reconstructors, you can use pseudo open-loop control: loop.method = "pseudo open-loop".
If you have an AO system where the WFSs see the uncorrected wavefront, you can run the simulation in open-loop:
loop.method = "open-loop";
loop.framedelay = 1;
loop.gain = 1;
loop.leak = 1.;
In open-loop, it is essential to set the loop gain to 1 and the leak to 1.
It is also possible to create high-order control laws and to control each DM with a separate controller. This is especially useful to separate the tip-tilt and DM control. For example, to implement the control law on dm(1):
$$ \frac{0.5 + 0.12 z^{-1} -0.05 z^{-2}}{1 - 0.64 z^{-1} -0.36 z^{-2}} $$dm(1).ctrlnum = &([0.5,0.12,-0.05]); dm(1).ctrlden = &([1,-0.64,-0.36]);
As it says, you need to install yorick-svipc. It is available right now (July 2010) through the maumae.net package source web page and on archlinux AUR. It will eventually make it in the Debian & Ubuntu repos.More work on yao parallel:
Depending on your system, i.e. WFS order, number of WFSs/DMs, whether you use dm.elt or not, sparse reconstructor or not, and more importantly, on the machine you run yao on, using the parallel features can make you gain anywhere between 20% and 200% in execution speed. If you want to use it, you will most probably have to experiment a bit to see what option should be set. Guidelines are given in the manual. The bottom line is that you should not use more forks (processes) than you have CPUs, otherwise swapping processes in/out of L2 cache introduce an overhead which cancels the paralleization advantage. With my core2duo laptop, I can typically gain 30 to 50%. With an 8 cores Xeon-based machine we have at work, I gain typically close to a factor of 2 (can be more or less). This does not seem particularly impressive, but one has to consider that a yao loop is made of many different individual operations: WFS, cMat product to retrieve the error, DM shape computation from the DM commands and the influence functions, PSF calculation, etc... So a gain in one of this items is only going to benefit the whole thing marginally. As far as the individual WFS parallelization is concerned, here are some hard numbers:
- I have merged some of the -useful- parallel features implemented in our Gemini local yao_mcao to the yao trunk. Namely,
- The DM/WFS parallelization (meaning, taking advantage of the fact that real systems have at least one frame delay (remember that even if the command is applied immediately after the measurements are received, there is still one frame delay due to the zero order hold). The one frame delay means the WFSing at iteration N is not needed to compute the command at iteration N, thus can be computed in parallel.
- The PSF calculations, which is a no brainer.
- I have implemented the parallelization of individual SHWFS. Meaning, an individual SHWFS can now run in parallel on an arbitrary number of "threads" (in fact, forks). This works only for Shack-Hartmann WFS. The good thing is that this is implemented fairly deep into the code, so any call to sh_wfs() will benefit from this, which means the iMat acquisition is accelerated too.
8 Core Xeon (2 boards) @ 3.33GHz, running RHEL 5, 32 bits. yorick/yao built with -O2. 16x16 SHWFS system, physical model, no noise. All times (avg & median) in milliseconds for one frame. sh16x16_svipc: 1 threads, sh_wfs() avg=2.86, median=2.90 sh16x16_svipc: 2 threads, sh_wfs() avg=1.87, median=1.89 sh16x16_svipc: 4 threads, sh_wfs() avg=1.37, median=1.37 sh16x16_svipc: 8 threads, sh_wfs() avg=1.14, median=1.15 sh16x16_svipc: 16 threads, sh_wfs() avg=2.33, median=2.30You can see that the speed increases up to 8 forks (max gain = 2.5x). Adding more forks makes the thing slower. The gain does not reach larger value just because (1) there are overheads associated to the use of shared memory/semaphores and (2) there is also a global overhead in the sh_wfs() function. What's parallelize is the core of sh_wfs() (FFTs, noise application and slopes calculations from spots), but any overhead within the sh_wfs() function itself, before calling the FFT/slopes calculation routine is not going to gain from the parallelization.The gain brought by the other, more general parallel features (DM/WFS & PSFs) is nicely illustrated by the following examples. This was run on the same machine (8 cores Xeon), with curvature.par (36 subapertures curvature system ran on a 120 pixels pupil). Look at the following results (I have omitted the timing results for items that are not of concerned here and were negligible):
sim.svipc=0 (no parallelization) time(1-2) = 9.89 ms (WF sensing) time(3-4) = 0.01 ms (cMat multiplication) time(4-5) = 1.04 ms (DM shape computation) time(5-6) = 5.84 ms (Target PSFs estimation) 59.18 iterations/second in average sim.svipc=1 (WFS/DM parallelized) time(1-2) = 4.11 ms (WF sensing) time(3-4) = 0.01 ms (cMat multiplication) time(4-5) = 0.94 ms (DM shape computation) time(5-6) = 5.78 ms (Target PSFs estimation) 91.43 iterations/second in average sim.svipc=2 (PSFs parallelized) time(1-2) = 10.69 ms (WF sensing) time(3-4) = 0.01 ms (cMat multiplication) time(4-5) = 1.05 ms (DM shape computation) time(5-6) = 1.23 ms (Target PSFs estimation) 76.41 iterations/second in averageThat's a typical example. The "no parallel" case is dominated by WFSing (10ms) and PSF (6ms) calculations. When parallelizing the WFS (sim.svipc=1), the WFSing time goes down to 4ms. Indeed, now 6ms of it can be done in parallel with other tasks: here, the PSF calculation that takes 6ms. With sim.svipc=2 (only the PSF are parallelized), the PSF calculation time goes to basically to 0 while the WFSing stays at 10ms. It all makes sense. I haven't put the sim.svipc=3 results as they are a little more difficult to understand and would just introduce confusion.
The individual WFS parallel feature is controlled by the parameter wfs.svipc. The "global" DMs/WFSs abd PSF parallelization is controlled by sim.svipc (bit 0 controls DM/WFS and bit 1 controls PSFs, thus sim.svipc=3 means both are turned on).
Of course, if you want to use yao parallel facilities, you will need to install the yorick-svipc plugin, through most of the normal channels. It runs on Linux (extensively tested) and OsX (somewhat tested).
It is difficult to code for parallel deployment. Especially for something like yao which offers a lot of various configuration option to the users. I have tested the parallel implementation quite a lot, but I am sure I have left some corners unexplorered/untested. So you might hit some unexpected features. Let me know if you do notice something weird. In the meantime, here is a list of things to watch out for when using the parallel (svipc) thingy (the first three items should not happen. I haven't seen it for a long time. But I originally saw it hence I give you these tricks in the unlikely event it happens) :
quit_wfs_forks() to kill (quit) the wfs forks to be
able to re-fork WFS processes with the correct parameters. So, for
instance, you could do the following:
> aoread,"some par file"; wfs.svipc=2; aoinit; aoloop; go; [...you get your results] > quit_wfs_forks > wfs.svipc=4; aoloop; go;This *should* work. As you get acquainted with the parallel extension, I suggest you keep a terminal open on the side, monitoring the yorick processes (htop or gnome-system-monitor does fine on linux). If it doesn't work, or you get lost, just restart the yorick session.
ipcs and manually kill the
culprits with ipcrm -M segment for shared memory
or ipcrm -S segment for semaphores. The one yao uses
generally start at 0x0badcafe (and up) for the shm and 0xdeadbeef
(and up) for semaphores. On modern linux systems, this can not harm
your machine or the state of your OS. You should never have to
reboot as a consequence of using shm/semaphores.More to come (a note to myself).
&float = pointer to a float array/vector (idem for &long, &string, etc...). Define it as:
atm(1).layerfrac = &([0.5,0.2,0.3]);I know, it seems weird, but there is a good reason to have done it like this.
| sim structure | ||||||
|---|---|---|---|---|---|---|
| VARIABLE NAME | TYPE | UNITS | DEFAULT | REQ? | COMMENT | |
| name | string | N/A | none | no | A name for this simulation run | |
| pupildiam | long | pixels | none | yes | Pupil diameter | |
| debug | long | N/A | 0 | no | Debug level | |
| verbose | long | N/A | 0 | no | Verbose level | |
| svipc | long | N/A | 0 | no | bitwise set features for parallelization: | |
| 0 = no parallelization | ||||||
| bits effect | ||||||
| 0(1) WFS/DM global split (2 process) | ||||||
| 1(2) PSFs calculation parallelization | ||||||
| e.g. sim.svipc = 1 -> split WFS/DM | ||||||
| e.g. sim.svipc = 2 -> parallelize PSFs | ||||||
| e.g. sim.svipc = 3 -> WFS/DM & PSFs | ||||||
| shmkey | long | N/A | no | shared memory key. Change in each session if running multiple yao session simultaneously. | ||
| semkey | long | N/A | no | semaphore svipc key. Change in each session if running multiple yao session simultaneously. | ||
| atm structure | ||||||
| VARIABLE NAME | TYPE | UNITS | DEFAULT | REQ? | COMMENT | |
| dr0at05mic | float | Unitless | none | yes | Dr0 at 0.5 microns, at zenith | |
| screen | &string | N/A | none | yes | Phase screen file names | |
| layerfrac | &float | Unitless | none | yes | Layer fraction. Sum to one is insured in aoinit | |
| layerspeed | &float | meter/sec | none | yes | Layer speed | |
| layeralt | &float | meter | none | yes | Layer altitude, at Zenith | |
| winddir | &long | Unitless | 0 | yes | Wind dir (not operational, use 0 for now) | |
| wfs structure | ||||||
| VARIABLE NAME | TYPE | UNITS | DEFAULT | REQ? | COMMENT | |
| type | string | N/A | none | yes | Valid types are "curvature", "hartmann", "pyramid", "zernike" or "user_function" where user_function is the name of a function defined by the user (see doc) | |
| lambda | float | micron | none | yes | WFS wavelength in microns | |
| subsystem | long | N/A | 1 | no | Subsystem this WFS belongs to | |
| gsmag | float | Unitless | 0 | no | WFS guide star magnitude. For LGSs, see below. Beware to set to something bright when doing your iMat | |
| skymag | float | Unitless | 0 (no sky) | no | WFS sky magnitude/arcsec^2. [0 means no sky] | |
| noise | long | N/A | 0 | no | Enable noise (photon noise & read out noise) | |
| ron | float | e- | 0 | no | Read out noise | |
| darkcurrent | float | e-/s/pixel | 0 | no | Dark current | |
| gspos(2) | float | arcsec | [0,0] | no | WFS guide star position [x,y] | |
| gsalt | float | meter | 0 | no | WFS guide star altitude, at zenith. 0 for infinity. | |
| gsdepth | float | meter | 0 | no | WFS guide star depth in meter, at zenith (e.g. Na layer thickness) | |
| laserpower | float | Watt | 0 | See comment | WFS laser power projected on sky (Na laser only). Required when using lasers. Exclusive with gsmag i.e. define one OR the other | |
| filtertilt | long | N/A | 0 | no | Filter TT on this sensor (0=no) | |
| correctUpTT | long | N/A | 0 | no | Correct uplink tip-tilt (0=no) | |
| uplinkgain | float | Unitless | 0 | no | Uplink TT loop gain | |
| dispzoom | float | N/A | 1.0 | no | Zoom factor for the display, useful in multi-WFS configuration (typically around 1) | |
| optthroughput | float | Unitless | 1.0 | no | Optical throughput to WFS | |
| disjointpup | long | N/A | 0 | no | If set, the WFS#n will be filtered by an array disjointpup(,,n) that has to be defined by the user. see user_pupil(). Allow for GMT-type topology | |
| Pyramid WFS only keywords | ||||||
| pyr_mod_ampl | float | arcsec | 0.0 | yes | pyramid wfs modulation amplitude radius [arcsec] | |
| pyr_mod_npts | long | N/A | 1 | yes | total number of point along modulation circle [unitless] | |
| pyr_padding | long | N/A | 0 | no | Pad the pupil image to reduce spatial aliasing [unitless]. A pad of 1 means adding wfs.npixpersub pixels on each side of the pupil image. Typical 0 to 4. | |
| pyr_mod_loc | string | N/A | "after" | yes | Location of modulation (before/after the field stop). Valid values are "before" or "after" | |
| Curvature WFS only keywords | ||||||
| l | float | meter | none | yes | Extra focal distance in a F/60 beam | |
| nsubperring | &long | Unitless | none | yes | # of subapertures per ring. See doc | |
| angleoffset | &float | degree | 0 | no | CCW Offset angle for first subaperture of ring. See doc | |
| rint | &float | Unitless | See comment | no | Inner radius for each ring, in fraction of pupil radius | |
| rout | &float | Unitless | See comment | no | Outer radius for each ring, in fraction of pupil radius | |
| fieldstopdiam | float | arcsec | 1.0 | no | Diameter of field stop. Used only to compute sky contribution (with skymag) | |
| Shack-Hartmann WFS only keywords | ||||||
| shmethod | long | N/A | none | yes | 1= Geometric, simple gradient average over subaperture. 2=Diffractive, full propagation | |
| shnxsub | long | Unitless | none | yes | # of subapertures in telescope diameter | |
| pixsize | float | arcsec | none | yes | Focal plane: Subaperture CCD pixel size in arcsec | |
| npixels | int | Unitless | none | yes | Focal plane: Final # of pixels per subaperture | |
| npixpersub | long | Unitless | none | no | Pupil plane: # of pixel in a subaperture (to force npixpersub and bypass constraint that pupildiam should be a multiple of this number e.g. to investigate lenslet larger than pupildiam | |
| pupoffset(2) | float | meter | [0,0] | no | Pupil plane: Offset of the whole WFS subapertures w.r.t telescope aperture. Allow misregistration w.r.t telescope pupil and other funky configurations | |
| shthreshold | float | e- | 0 | no | Threshold for the computation of the subaperture signal from CCD spots >= 0 | |
| biasrmserror | float | e- | 0 | no | rms error on WFS CCD bias in electron | |
| flatrmserror | float | Unitless | 0 | no | rms error on WFS CCD flat, referenced to 1 (i.e. 0.1 mean 10% rms error). Typical value can be 0.01 | |
| fsname | string | N/A | none | no | Fits file with subaperture amplitude mask. It should have dimension 2^sdimpow2 square. Can be float or long. | |
| fstop | string | N/A | "square" | no | Valid fiels stop type are "none", "square" or "round" | |
| fssize | float | arcsec | sub. size | no | Side (square) or diameter (round) of field stop | |
| fsoffset(2) | float | arcsec | [0,0] | no | Field stop offsets [x,y] | |
| kernel | float | arcsec | See comment | no | FWHM in arcsec of WFS spot gaussian kernel. Default is computed as a function of D/r0 and only used during iMat calibration | |
| nintegcycles | int | Unitless | 1 | no | # of iterations over which to integrate before delivering slopes | |
| fracIllum | float | Unitless | 0.5 | no | Focal plane: Fraction of subaperture illuminated for the subaperture to be valid | |
| LLTxy(2) | float | meter | [0,0] | no | Coordinates [x,y] of the laser projector, if any | |
| centGainOpt | long | N/A | 0 | no | Centroid gain optimization flag. Only for LGS (correctupTT and filtertilt must also be set for this to work) | |
| rayleighflag | int | N/A | 0 | no | Take rayleigh into account? | |
| svipc | long | N/A | 0 | no | Number of parallel processes (forks) to use for this WFS (0 or 1: don't parallelize, N: use main + (N-1) forks) | |
| Zernike WFS only keywords | ||||||
| nzer | int | Unitless | none | yes | Number of Zernike to be sensed. Starts at piston included. | |
| dm structure | ||||||
| VARIABLE NAME | TYPE | UNITS | DEFAULT | REQ? | COMMENT | |
| type | string | N/A | none | yes | Valid types are "bimorph", "stackarray" "tiptilt", "zernike", "diskharmonic", "kl", "segmented", "aniso" or "user_function", where user_function is the name of a function provided by the user | |
| pitch | long | pixel | none | yes | Actuator pitch (pixel). stackarray/segmented only | |
| subsystem | long | N/A | 1 | no | Subsystem this DM belongs to | |
| iffile | string | N/A | "" | no | Influence function file name. Leave it alone. | |
| alt | float | meter | 0 | no | Conjugation altitude, at zenith | |
| hyst | float | Unitless | 0 | no | DM actuator hysteresis (0. to 1.) | |
| push4imat | float | Volt | 20 | no | Voltage to apply for iMat calibration. Note: the default is not OK for many configs. Change at will | |
| thresholdresp | float | Unitless | 0.3 | no | Normalized response threshold (in WFS signal) below which an actuator will not be kept as valid | |
| unitpervolt | float | mic/Volt | 0.01 | no | Influence function sensitivity in unit/volt. Stackarray: micron/Volt, Tip-tilt: arcsec/Volt. | |
| maxvolt | float | Volt | none | no | Saturation voltage (- and +) in Volt. None if not set | |
| gain | float | Unitless | 1.0 | no | Loop gain for this DM (total = this times loop.gain) | |
| misreg(2) | float | pixel | [0,0] | no | DM misregistration [x,y] | |
| xflip | long | N/A | 0 | no | Flip DM left/right (0=no) | |
| yflip | long | N/A | 0 | no | Flip DM up/down (0=no) | |
| pupoffset(2) | float | meter | [0,0] | no | Global offset of whole actuator pattern w.r.t pupil | |
| disjointpup | long | M/A | 0 | no | If set, dm(n) will be filtered by an array disjointpup(,,n) that has to be defined by the user. See user_pupil(). Allow for GMT-type topology. | |
| Stackarray-only (SAM, PZT) keywords | ||||||
| nxact | long | Unitless | none | yes | Number of actuator in pupil diameter | |
| elt | long | N/A | 0 | no | ELT mode: allow to save huge amount of RAM and time for the computation of the DM shape. No drawback | |
| coupling | float | Unitless | 0.2 | no | Influence function coupling coefficient | |
| ecmatfile | string | N/A | none | no | Valid to extrapolated projection matrix (extrap_com) | |
| noextrap | long | N/A | 0 | no | Set to disable use of extrapolated actuators | |
| pitchMargin | float | Unitless | 1.44 | no | Margin to include more corner actuators when creating inf.functions optional [1.44] | |
| irexp | long | N/A | 0 | no | Use original functional form (irexp=0) or exp(-(d/irfact)^1.5) model (irexp=1) or sinc*gaussian (irexp=2) | |
| irfact | float | Unitless | 1.0 | no | use when irexp=1 (see above) | |
| regparam | float | Unitless | 0.0 | no | Parameter that determines the strength of the regularization. Set to zero for systems like tip-tilt mirrors and to a small positive value (e.g., 1e-4) for stackarray DMs. Experiment by trial an error to get the value that produces the highest Strehl. Experience shows that any value within a factor of four of optimal produces the same results. | |
| regtype | string | N/A | "identity" | no | Regularization approach: "identity" (default) or "laplacian" | |
| regmatrix | &float | Unitless | none | no | Pointer to the regularization matrix to use instead of computing one of the two options. This is usually not necessary, but is left as an option for advanced users. A good choice would be the inverse covariance matrix of the turbulence, for example. | |
| Bimorph-only keywords | ||||||
| nelperring | &long | Unitless | none | yes | Number of electrodes per ring, e.g &([6,12,18]) | |
| angleoffset | &float | degree | 0 | no | Offset angle for first electrode in ring | |
| rint | &float | Unitless | See comment | no | Inner radius for each ring, see doc | |
| rout | &float | Unitless | See comment | no | Outer radius for each ring, see doc | |
| supportRadius | float | Unitless | 2.2 | no | Radius of DM 3 support points, normalized in pupil radius | |
| supportOffset | float | dgree | 90 | no | Angle offset of first support point | |
| Zernike DM-only keywords | ||||||
| nzer | long | Unitless | none | yes | Number of Zernike modes, including piston | |
| Disk Marmonic-only keywords | ||||||
| max_order | long | Unitless | none | yes | Number of Disk Harmonic modes, including piston | |
| Karhuenen-Loeve DM-only keywords | ||||||
| nkl | long | Unitless | none | yes | Number of Karhuenen-Loeve modes, including piston??? | |
| Segmented DM-only keywords | ||||||
| nxseg | long | Unitless | none | yes | Number of segments in long axis (X) | |
| fradius | float | pixel | See comment | no | Segments are created over a wider area than the nxseg defined above. Only segments which distance to the (0,0) pupil coordinates is <= fradius will be kept. default dm.pitch*dm.nxseg/2. | |
| mat structure | ||||||
| VARIABLE NAME | TYPE | UNITS | DEFAULT | REQ? | COMMENT | |
| method | string | N/A | "svd" | no | Reconstructor creation method ("svd", "mmse" or "mmse-sparse") | |
| condition | &float | Unitless | none | yes | Condition numbers for SVD, per subsystem. | |
| file | string | N/A | none | ??? | iMat and cMat filename. Leave it alone. | |
| sparse_MR | long | Unitless | 10000 | no | Sparse only: maximum number of rows (actuators) in the imat | |
| sparse_MN | long | Unitless | 200000 | no | Sparse only: maximum number of elements in the imat | |
| tel structure | ||||||
| VARIABLE NAME | TYPE | UNITS | DEFAULT | REQ? | COMMENT | |
| diam | float | meter | none | yes | Telescope diameter | |
| cobs | float | Unitless | 0. | no | Central obstruction / telescope diameter ratio | |
| Tip vibration parameters | ||||||
| tipvib_white_rms | float | arcsec | 0. | no | rms of vibration white noise | |
| tipvib_1overf_rms | float | arcsec | 0. | no | rms of vibration 1/f noise (from 1 Hz to cutoff) | |
| tipvib_peaks | &float | Hz | 0 | no | positions of vibration peak in PSD | |
| tipvib_peaks_rms | &float | arcsec | 0 | no | rms of each vibration peaks (defined above) | |
| tipvib_peaks_width | &float | Hz | 1freq bin | no | width of each vibration peaks (default 1 freq bin) | |
| tilt vibration parameters | ||||||
| tiltvib_white_rms | float | arcsec | 0. | no | rms of vibration white noise | |
| tiltvib_1overf_rms | float | arcsec | 0. | no | rms of vibration 1/f noise (from 1 Hz to cutoff) | |
| tiltvib_peaks | &float | Hz | 0 | no | positions of vibration peak in PSD | |
| tiltvib_peaks_rms | &float | arcsec | 0 | no | rms of each vibration peaks (defined above) | |
| tiltvib_peaks_width | &float | Hz | 1freq bin | no | width of each vibration peaks (default 1 freq bin) | |
| target structure | ||||||
| VARIABLE NAME | TYPE | UNITS | DEFAULT | REQ? | COMMENT | |
| lambda | &float | micron | none | yes | Image wavelengths in micron | |
| xposition | &float | arcsec | none | yes | "Targets" X positions in the field of view | |
| yposition | &float | arcsec | none | yes | "Targets" Y positions in the field of view | |
| dispzoom | &float | Unitless | 1. | no | Display zoom, useful for multi-targets. Typically around 1 | |
| gs structure | ||||||
| VARIABLE NAME | TYPE | UNITS | DEFAULT | REQ? | COMMENT | |
| zeropoint | float | See comment | none | yes | Photometric zero point (#photons@pupil/s/full_aper, mag0 star). | |
| zenithangle | float | degree | 0 | no | Zenith angle. The zenith angle is used to compute: r0 off-zenith, atmopheric turbulence layer altitude, LGS altitude and thickness of Na Layer, LGS brighness note that dm altitude is unchanged | |
| lgsreturnperwatt | float | phot/cm2/s | 22. | no | Sodium LGS return in photons/Watt/cm2/s at entrance pupil, at zenith. Modified by gs.zenithangle. Basically, you have to fold in this the sodium density and your model of return | |
| loop structure | ||||||
| VARIABLE NAME | TYPE | UNITS | DEFAULT | REQ? | COMMENT | |
| niter | long | Unitless | none | yes | Total number of iterations | |
| ittime | float | second | none | yes | Iteration time (sampling time) | |
| gain | float | Unitless | 0 | See comment | Loop gain. Optional, but important! | |
| leak | float | Unitless | 0 | no | Leak term (0 means no leak) | |
| gainho | &float | Unitless | 0 | no | Higher order gains (starting at 2nd order, up to 10th) | |
| leakho | &float | Unitless | 0 | no | Higher order leaks (starting at 2nd order, up to 10th) | |
| framedelay | long | frames | 0 | no | Loop delay (# of frames). Regular CCD 1 frame integration -> framedelay=1 + readout & Calculation -> framedelay=2 | |
| startskip | long | iteration | 10 | no | Number of iteration to skip before collecting statistics | |
| skipevery | long | iteration | 0 | no | In phase screen, skip by "skipby" steps every "skipevery" iterations (0=none). See doc | |
| skipby | long | iteration | 10000 | no | See above. This is to get better statistical coverage | |
| stats_every | long | iteration | 4 | no | Compute stats every so many iteration | |
| jumps2swapscreen | long | Unitless | 0 | no | Number of jumps (i.e. niter/skipevery) after which screens will be swapped (rotation, 2->1, 3->2... 1->last). Default is no jump. | |
| modalgainfile | string | N/A | "" | no | Name of file with mode gains | |
| opt structure | ||||||
| VARIABLE NAME | TYPE | UNITS | DEFAULT | REQ? | COMMENT | |
| phasemaps | string | N/A | none | no | Filename of phasemap. Z scale should be in microns | |
| alt | float | meter | 0 | no | Equivalent altitude in m. | |
| misreg(2) | float | pixels | [0,0] | no | Misregistration [x,y] (similar to DM, see above) | |
Thanks to yorick and the structure of yao, scripting is relatively easy. The principle is as follow:
Here is a simple example you can find in the examples directory (yao_loop_example.i):
require,"yao.i";
// check if generic phase screens exist, if not, create them:
write,"CREATING PHASE SCREENS";
if (!open(Y_USER+"data/screen1.fits","r",1)) {
create_phase_screens,1024,256,prefix=YUSER+"data/screen";
}
// the "wait" is needed here:
window,33,wait=1;
// read out parfile
aoread,"test.par";
atm.dr0at05mic = 35; // be more gentle
// Define vector on which we want to loop and final strehl array.
// We want to estimate performance for 3 values of the guide star
// magnitude and 4 values of the loop gain (for instance)
gsmagv = [6,9,12]; // guide star mag vector
gainv = [0.01,0.1,0.5,1.0]; // gain vector
// strehl array to store results:
strehlarray = array(0.,[2,numberof(gsmagv),numberof(gainv)]);
// loop on gsmag and gain
for (ii=1;ii<=numberof(gsmagv);ii++) {
for (jj=1;jj<=numberof(gainv);jj++) {
wfs(1).gsmag=gsmagv(ii);
loop.gain=gainv(jj);
// it's safer, but not always necessary, to call again
// aoinit (here for gsmag). some parameters do not need it.
aoinit,disp=1;
// Setup loop:
aoloop,disp=1;
// go: do all loop.niter
go, all=1;
// after_loop() is now called automatically at last iter of go()
strehlarray(ii,jj) = strehllp(0); // fill in result array
// and display results as we go:
window,33;
fma;
for (ll=1;ll<=ii;ll++) {
plg,strehlarray(ll,),gainv,color=-ll-4;
plp,strehlarray(ll,),gainv,color=-ll-4,symbol=4,size=0.6;
ylims=limits()(3:4); ymax=ylims(2); yspace=(ylims(2)-ylims(1))/15.;
plt,swrite(format="gsmag=%d",gsmagv(ll)),0.011,ymax-yspace*(ll-1), \
justify="LT",tosys=1,color=-ll-4;
}
logxy,1,0;
xytitles,"Loop Gain",swrite(format="Strehl @ %.2fmicrons",(*target.lambda)(0));
window,0;
}
}
You can do all kind of scripting like this to find for instance the optimal
working point for a system in given conditions (above, what is the best gain for a
given GS magnitude). We could also have added a loop on wfs.ittime
in the example above. One has however to be careful: Probing multi-dimensional
spaces can quickly be overwhelming in execution time. Generally, I consider
that 10000 iterations are needed to give a statistically significant answer.
So for instance, in the example
above. that would mean 4x3x10000=120000 iterations total.
At 90 iterations/seconds, this means 1300 seconds (about 20mn). Adding 4 points for
wfs.ittime would lead to 480000 iterations, or 1 hour and 20mn.
This can quickly become prohibitive.
At one point or another, if you are serious about simulating your system, it is likely that you will need this or that feature, or modification to the existing yao code.
Go ahead and dive. Feel free to modify yao. It's open source after all. The goal of this too-short section is to give you some head start for doing just that: hacking yao.
So, various points, in no particular order:
yao.i, and includes the base functions aoread(), aoinit(), aoloop(), go(), after_loop() and more. Other important include files are:
yao_wfs.i: All functions related to WFS and their initialization.yao_dm.i: All functions related to DM and their initialization.turbulence.i: Functions to generate turbulent phase screens. Some more turbulence functions are in yao.iyao_structures.i: Definitions of yao structures.aoutil.i and yao_util.i: check_parameters, and in general utility functions that didn't fit anywhere else. yao_fast.i and yao_utils.i: Interface functions to the C routines. Mostly declaration of prototypes as per yorick plug_in APIs.yaokl.i: KL creation functions.yao_fast.c: C code for the SHWFS and CWFS, plus some Poisson and Gaussian noise fast functions.go() and after_loop() for more details):
imav(sim._size,sim._size,#_target,#_lambda): the averaged images for each target and at each requested wavelength. strehl(#_target,#_lambda) contains the long exposure image Strehl ratio for each target and each requested wavelength.fwhm(#_target,#_lambda) contains the long exposure image FWHM for each target and each requested wavelength [mas].e50(#_target,#_lambda) contains the long exposure image 50% encircled energy diameter for each target and each requested wavelength [mas].cbmes, cbcom, cberr are the "circular buffers" that contain all WFS measurements, DM commands and DM errors (updates to DMs at each iterations). Only saved if keyword savecb is set in call to aoloop().iMat, cMat: Interaction and control matrices. One axis is the WFS axis. The WFS measurements are put in sequence: all X, then all Y for WFS#1, then all X, then all Y for WFS#2, etc... The other axis is the DM axis. Here also, all valid actuators for DM#1, then DM#2, etc...modToAct, mesToMod, eigenvalues: The U, transpose of V and eigenvalues of the SVD inversion. Over the unmasked eigenvalues, cMat is computed as follow:
cmat = ( modToAct(,+) * mev(+,) )(,+) * mesToMod(+,);
There is a lot of things missing in this documentation. I will try to complement it as time allows. I hope however that this will help you getting the best out of yao and avoiding frustration. Yao is a fairly complete AO simulation tool. It is flexible and fast. Flexibility means I can not exert too much control over the user input parameters. If I were to do that, I would necessarily impose a straitjacket over your creativity, and we want to avoid this at all cost. So, yes, there is a steep learning curve, but at the end, you should be able to wrestle yao into submission! I have only one more advice to give: check your results. And recheck them. And make sure it makes physical sense.